I’ve been working in the Structures-Computer Interaction Lab at UCLA to build a Bacteria Robot that swims with a flagellar tail. The ultimate goal is to describe the locomotion of bacteria which propel themselves using flagella. My recent effort has been directed towards creating a working prototype that can swim along a pre-programmed path with a soft tail. It swims in glycerin to imitate the low Reynold’s number fluid experienced by microscopic organisms.
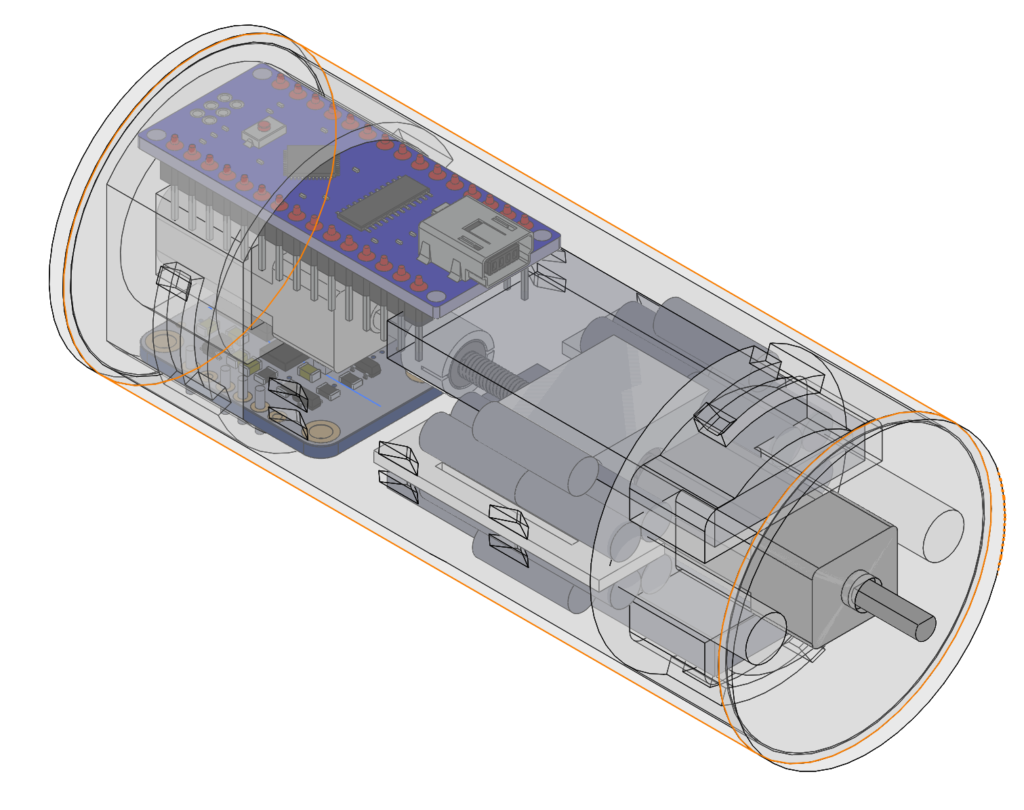
This prototype uses two DC motors: one to power the tail (not shown) and one to move the robot’s internal weighted slider, which moves it’s center of mass. The movable center of mass resolves many of the balancing issues of the previous prototype. It uses an Adafruit BNO055 IMU to determine its orientation and is controlled by an Arduino Nano. The body is 10 cm long and made of 3D-Printed plastic. Despite the self-adjusting center of mass, it is still challenging to make the robot neutrally buoyant. Making it follow a specific path is also difficult, as the propulsive force of the tail is minimal.
